Tras la
segunda entrega de nuestro reportaje, continuamos esta semana terminando el repaso por los hitos más destacables en robótica de la segunda mitad del siglo XX. Además explicaremos la clasificación más formalizada que existe para catalogar a los robots según su generación.
Hitos de la segunda mitad del siglo XXYa casi entrados en la década de los años 50 del siglo pasado, en 1948 se fabricó el primer robot con un comportamiento biológico simple de la historia. Su diseñador fue William Grey Walter, un norteamericano experto en neurofísica y robótica que con sus conocimientos llegó a crear robots como cerebros artificiales simples para estudiar el comportamiento. Fabricó un robot móvil de pequeño tamaño apodado "la tortuga" mediante una carcasa de plástico que actuaba con un sensor de golpe y que era capaz de seguir la luz.
William Grey Walter formó parte en EE.UU. del selecto grupo dirigido por Norbert Wiener, fundadores de la cibernética y la robótica moderna. Walter estaba empeñado en demostrar que un sistema robótico con un reducido número de conexiones tendría la capacidad de desarrollar un comportamiento medianamente complejo. Sus robots tortuga, apodados Elmer y Elsie, analizaban las condiciones de su ambiente y se desplazaban de forma autónoma a donde éstas fueran más favorables.
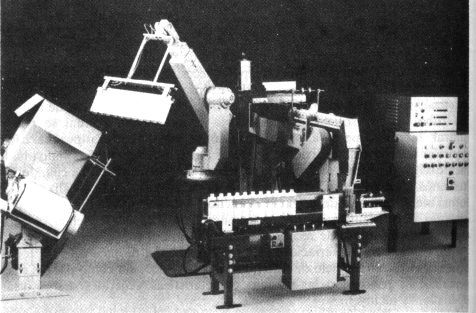
En 1956 vio la luz Unimate, el primer robot industrial. Fue fabricado por la compañía Unimation y no fue hasta 1961 cuando realmente se implantó en una fábrica. El primer robot industrial de la historia se implementó en una cadena de montaje de la compañía General Motors en Nueva Jersey.
Creado por George Devol usando una patente original propia, la máquina era capaz de transportar piezas de gran peso hasta la cadena de montaje y soldar dichas piezas al chasis del vehículo. Un trabajo con gran peligrosidad para el ser humano debido a la inhalación de gases o riesgo de quemaduras entre otros.
George Devol fundó así junto a Joseph Engelberger la primera empresa fabricante de robots de la historia llamada Unimation. Unimate estaba formado básicamente por una caja central donde se encontraba el ordenador y ésta a su vez se conectaba a otra caja en la que estaba su brazo robótico. Este robot gozó de mucha popularidad apareciendo en programas de televisión, gracias a que también desempeñada tareas del hogar. En 2003 se incorporó al
Robot Hall of Fame.
En 1964 se abren los laboratorios de investigación en inteligencia artificial en el MIT, el SRI (Stanford Research Institute) y en la universidad de Edimburgo. Poco después los japoneses que anteriormente importaban su tecnología robótica, se sitúan como pioneros del mercado de la robótica.
Durante los años posteriores, en la década de los 60 y 70, los robots industriales acusaron un gran avance. Nacieron por ejemplo los robots paletizadores especialistas en almacenaje, nuevos diseños que incorporaban hasta seis ejes electromecánicos o el primer brazo manipulador programable universal fabricado por la misma Unimation en 1975.
Hubo que esperar hasta el año 2000 para que Honda Motor presentase el primer robot humanoide capaz de desplazarse de forma bípeda e interactuar con personas, nombrado Asimo en homenaje al escritor de ciencia ficción y visionario de la robótica Isaac Asimov. Aunque se ha escrito mucho sobre este revolucionario robot, nosotros entraremos en más detalles en la próxima entrega del reportaje.
Clasificando a los robotsExisten diferentes clasificaciones para englobar a los robots en función de sus características. Tendremos en cuenta una de las más utilizadas referida a la generación a la que pertenecen:
Primera generación: Aquellos robots manipuladores sobre todo pertenecientes a la franja entre los años 50 y finales de los 70 que ejecutan tareas programadas de forma secuencial. No tienen en cuenta su entorno o adquieren información muy limitada al respecto. El Unimate que hemos descrito anteriormente pertenecería a esta generación.
Segunda generación: Aquí se engloban los llamados robots de aprendizaje. Se desarrollan a principios de la década de los 80 y son algo más conscientes de su entorno que la anterior generación, sobre todo debido a sus sensores y al control de lazo cerrado que les permite realizar una acción en función de los datos recogidos.
Esta generación de robots también tiene la capacidad de aprender y memorizar una secuencia de movimientos que ha sido realizada previamente por un operador humano. Además incorporan un sistema de retroalimentación gracias al cual pueden guardar sus instrucciones junto a los datos del entorno que recogen sus sensores.
Tercera generación: En esta generación los robots ya son reprogramables. Incorporan sensores, controladores y computación interna que permite la aparición de los primeros lenguajes de programación enfocados a la robótica. También es importante destacar que en esta generación se comienza a desarrollar la visión artificial. Se les conoce como robots con control sensorizado.
Cuarta generación: Aquí llegamos a los robots "inteligentes". Mediante una serie de conceptos aprendidos, estos robots utilizan sus avanzados sensores para adaptarse al entorno en tiempo real. La información que van registrando se envía a su procesador central para que éste tome una decisión de actuación en función de los modelos teóricos que contiene la memoria del robot.
También aparecen en esta generación las primeras referencias a las
redes neuronales, al control difuso y la lógica difusa o borrosa. Hablamos de un tipo de control que se basa en lo relativo de lo observado. Este tipo de lógica toma valores de procesos los cuales están contextualizados y referidos entre sí. Por ejemplo, una persona que mide 2 metros es claramente una persona alta, siempre que previamente se haya tomado la altura de 1 metro como la de una persona baja.
Quinta generación: En la actualidad más vanguardista de la robótica se está desarrollando una nueva generación puntera de robots. Basados en la arquitectura de subsunción, cuyo máximo promotor es Rodney Brooks, se quiere conseguir que el control parta de la correcta organización y distribución de los módulos conductuales basados totalmente en la inteligencia artificial.
En nuestra próxima y última entrega recorreremos un auténtico catálogo de los robots más destacados que existen en la actualidad. Desde el famoso Asimo, pasando por el robot astronauta Kirobo o los seres artificiales con aspecto casi humano que están causando sensación en Japón.


![[+risas]](/images/smilies/nuevos/risa_ani3.gif "más risas")





![[carcajad]](/images/smilies/nuevos/risa_ani2.gif "carcajada")
![[mad]](/images/smilies/nuevos/miedo.gif "loco")